
What's new for 2020?
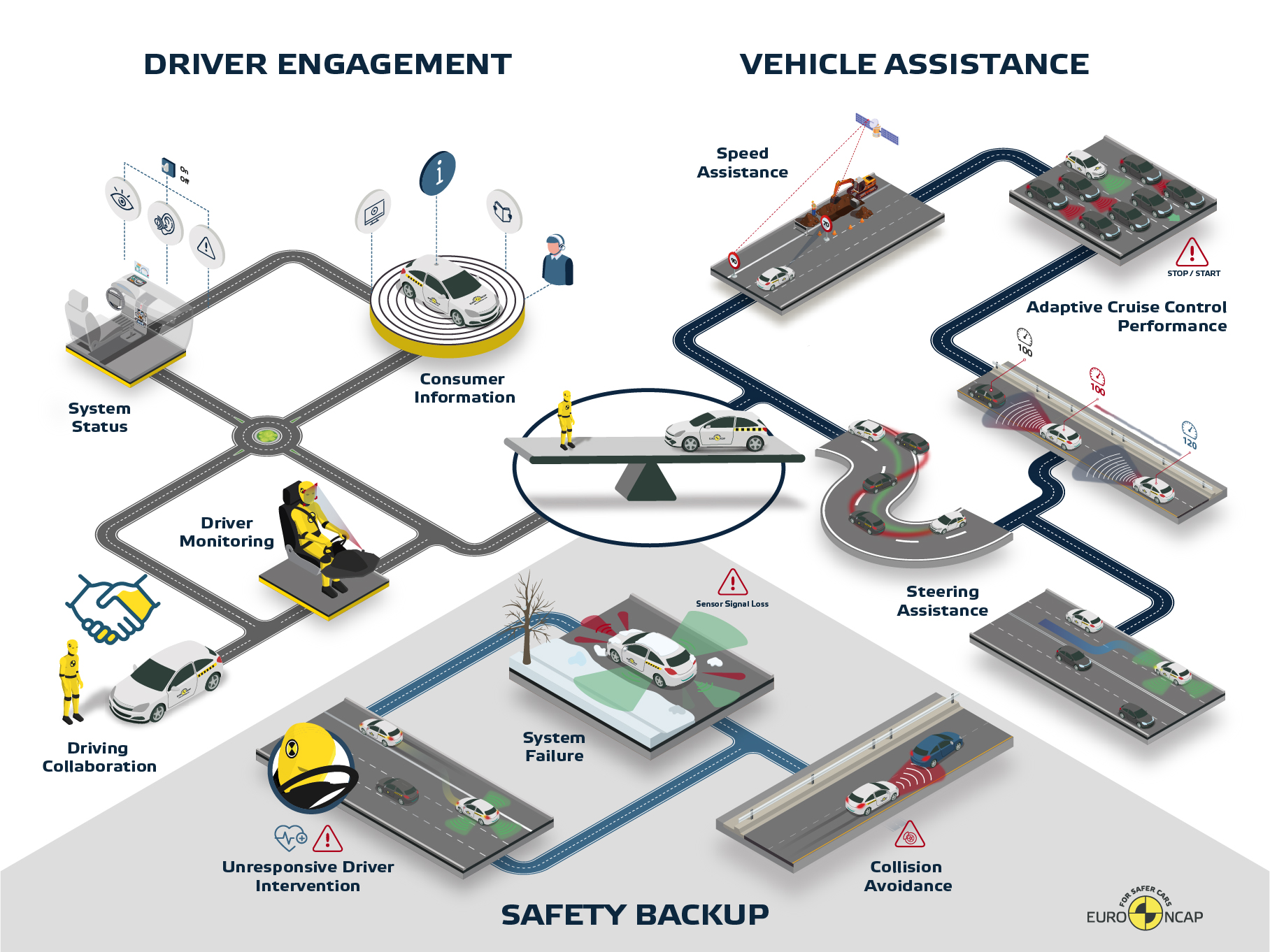
For its 2020 assessment of Highway Assist systems, Euro NCAP has developed dedicated test and assessment protocols, divided into two main areas: Assistance Competence, based on the balance between Driver Engagement and Vehicle Assistance, and Safety Backup.
Assistance Competence
To ensure optimal safety and support, the level of assistance provided by the vehicle must be matched by the perception of the driver and the ability of the system to keep the driver engaged and in the driving task.
Driver Engagement
 Protocols in this area consider how well the manufacturer explains to consumers how the system works, makes clear its limitations and ensures that there is a clear communication so that the driver and the system can cooperate to control the vehicle safely. The protocols are:
Protocols in this area consider how well the manufacturer explains to consumers how the system works, makes clear its limitations and ensures that there is a clear communication so that the driver and the system can cooperate to control the vehicle safely. The protocols are:
Consumer Information
A good system name should not be misleading and should contain the word Assistance to clearly identify the system design and its purpose to assist the driver. Moreover, the system name should never contain ‘auto’ or refer to automation.
System Status
Any system should clearly indicate its status to the driver (i.e. whether it is engaged or disengaged) using visual, audible or haptic signals or a combination of these.
Driver Monitoring
With an increasing level of Assistance, it becomes more and more critical for the system to ensure that the driver remains engaged in the driving task. The best systems have Driver Monitoring sensors that can “see” the driver to determine the level of engagement. When a disengaged driver is detected, the system should issue a warning and should escalate this warning after some time. Finally, if there is no driver response, the system should enter an emergency mode.
Driving Collaboration
Driver Assist systems should offer steering support while the driver maintains full control and work with the driver’s intentions, not against it. The steering input applied to the steering-wheel to override the system should not feel like fighting against the vehicle. When the driver steers away from the middle of the lane, for any reason, the system should stay engaged but always overridable, to ensure the feeling of co-operation, not a hand-over of control.

Vehicle Assistance
 This part of the assessment looks at how well the AD system controls the vehicle when it is engaged: whether or not it reacts properly to the huge variety of speed control limitations that may be encountered, for example, or the amount of steering support in highway type curves. The protocols here are:
This part of the assessment looks at how well the AD system controls the vehicle when it is engaged: whether or not it reacts properly to the huge variety of speed control limitations that may be encountered, for example, or the amount of steering support in highway type curves. The protocols here are:
Speed Assistance
Highways throughout Europe have changing speed limits depending on weather conditions, density of traffic or time of day. Many systems support the driver to set the speed of the adaptive cruise control (ACC) to the correct speed limit. The best systems will also support the driver to lower the speed in cases where the official maximum speed limit exceeds the safe and appropriate speed for a road, considering features such as tight bends.
Adaptive Cruise Control Performance
 Adaptive Cruise Control (ACC) is a comfort system to maintain a safe distance to the car ahead. However, even on a day-to-day drive, ACC might have to deal with more critical events like vehicles cutting in front of the car or, in an extreme case, a stationary vehicle ahead. Well-developed systems will respond in due time to a variety of situations, including those that are infrequent but very critical.
Adaptive Cruise Control (ACC) is a comfort system to maintain a safe distance to the car ahead. However, even on a day-to-day drive, ACC might have to deal with more critical events like vehicles cutting in front of the car or, in an extreme case, a stationary vehicle ahead. Well-developed systems will respond in due time to a variety of situations, including those that are infrequent but very critical.


Steering Assistance
While maintaining steering control as a driver, the system supports the driver to stay in lane in a sequence of bends. Good systems will at least initiate a steering action to assist the driver to make the correct turn and/or, in case of tight bends, lower the speed to ensure the turn can be made without maximum effort.


In an area of assisted driving that is strongly regulated, some systems offer a driver-initiated Lane Change Assist which uses rearward and sideways looking sensors to ensure the adjacent lane is free before the vehicle makes the lane change.
Safety Backup
Highway Assist systems are comfort features to support the driver during a journey. Where comfort support is not sufficient to avoid an imminent collision, a safety system should take over and intervene using all means possible, regardless of occupant comfort. In Safety Backup, the extent to which the system is fail-safe is assessed, in cases where the driver has failed to react to a critical event, and how it responds in these emergency situations. The protocols are:
Collision Avoidance
Where the vehicle comfort level of support would not avoid or would only mitigate an accident, the vehicle should intervene more strongly (without regard for driver comfort), using AEB or LSS, to try to avoid an accident in case the driver does not intervene.
System Failure
In extreme weather conditions like heavy snow or rain or a malfunctioning sensor, it is crucial that the driver is informed and that systems are disengaged.
Unresponsive Driver Intervention
In another unlikely event where the driver has been disengaged for a long period and the warning sequence has failed to get the driver back in the loop, the system should assume that the driver is physically unable to drive. With that assumption, the vehicle should bring the vehicle to a controlled stop, ideally on the hard shoulder, while maintaining lateral and longitudinal control. Automatic lane change in this circumstance is prohibited by regulation but would be the preferred manoeuvre above bringing the vehicle to a halt in the lane of traffic.
